ES详解 - 原理:从图解构筑对ES原理的初步认知
ES详解 - 原理:从图解构筑对ES原理的初步认知
在学习ElasticSearch原理时,我推荐你先通过官方博客中的一篇图解文章(虽然是基于2.x版本)来构筑对ES的初步认知(这种认识是体系上的快速认知)。@pdai
前言
本文先自上而下,后自底向上的介绍ElasticSearch的底层工作原理,试图回答以下问题:
为什么我的搜索
*foo-bar*无法匹配foo-bar?为什么增加更多的文件会压缩索引(Index)?
为什么ElasticSearch占用很多内存?
版本
elasticsearch版本: elasticsearch-2.2.0
图解ElasticSearch
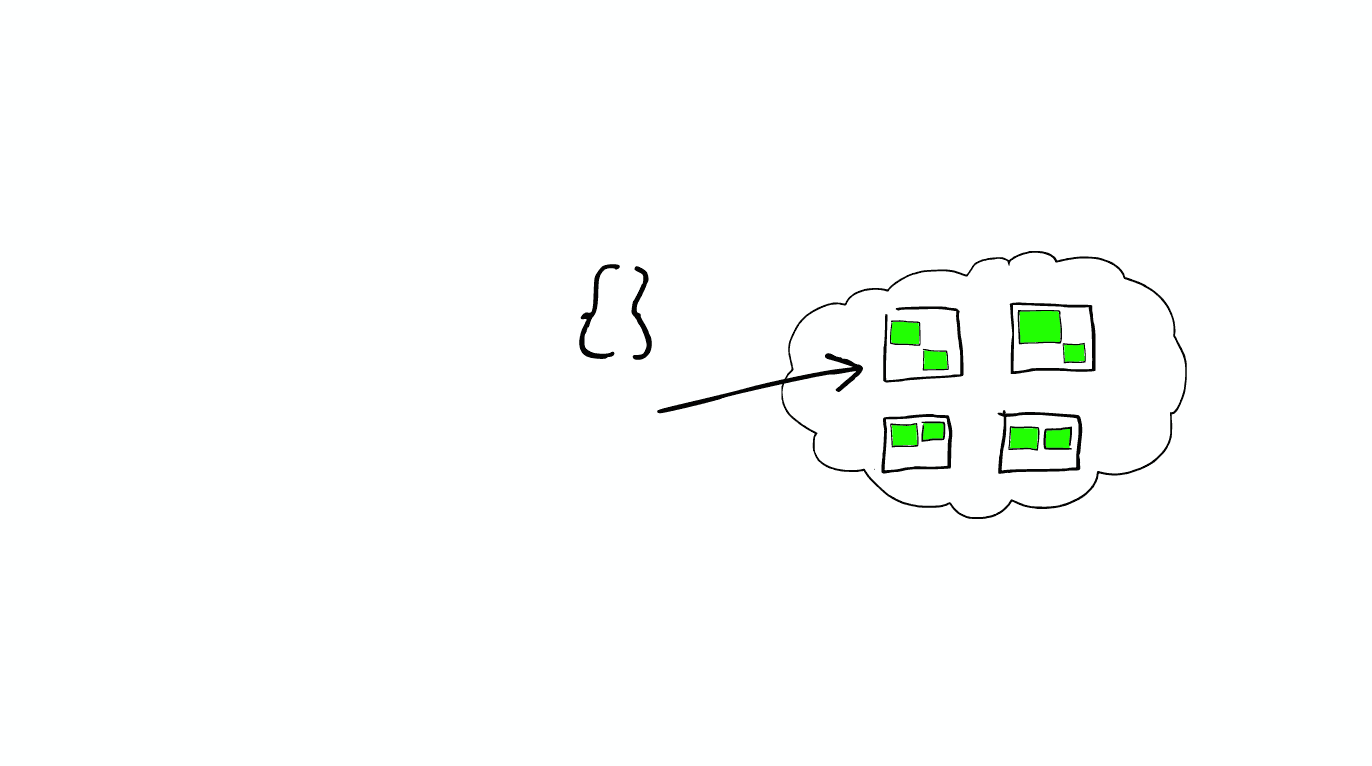
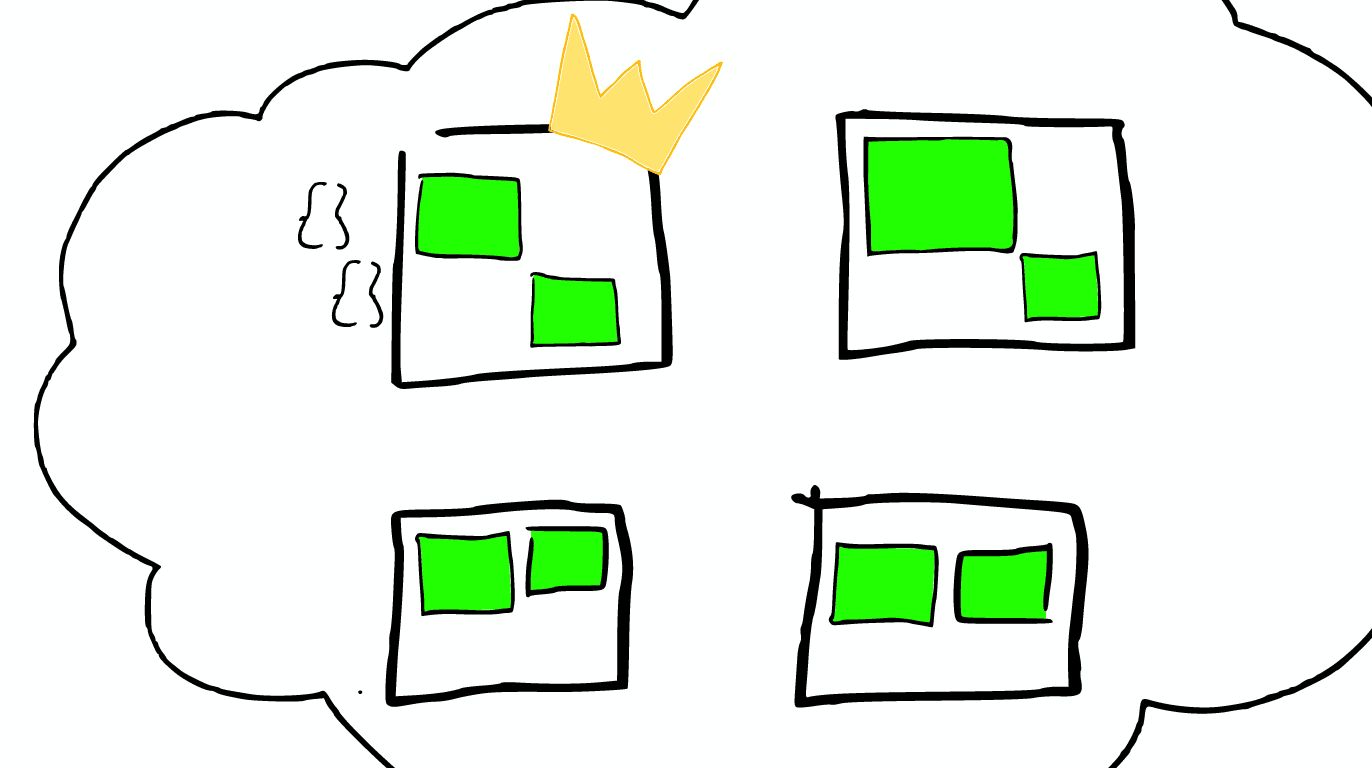
- 云上的集群

- 集群里的盒子
云里面的每个白色正方形的盒子代表一个节点——Node。

- 节点之间
在一个或者多个节点直接,多个绿色小方块组合在一起形成一个ElasticSearch的索引。
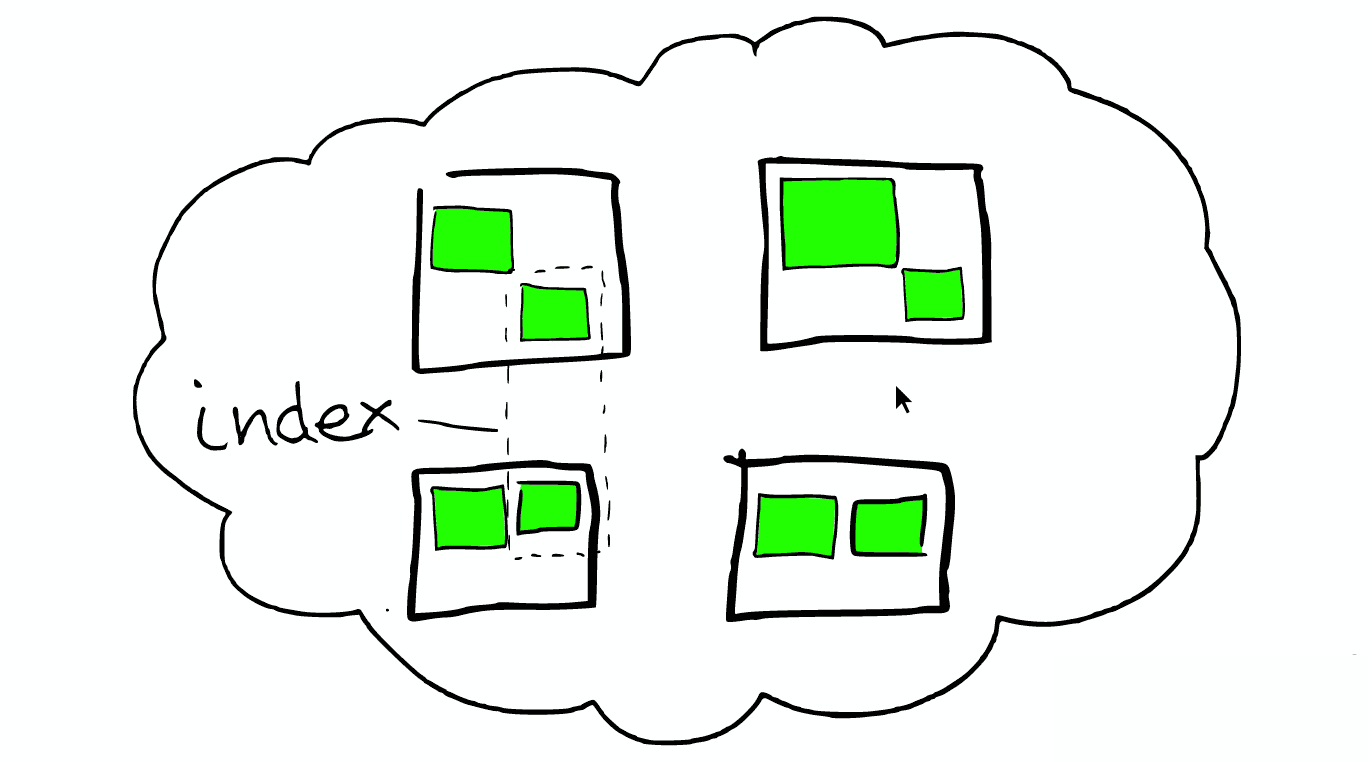
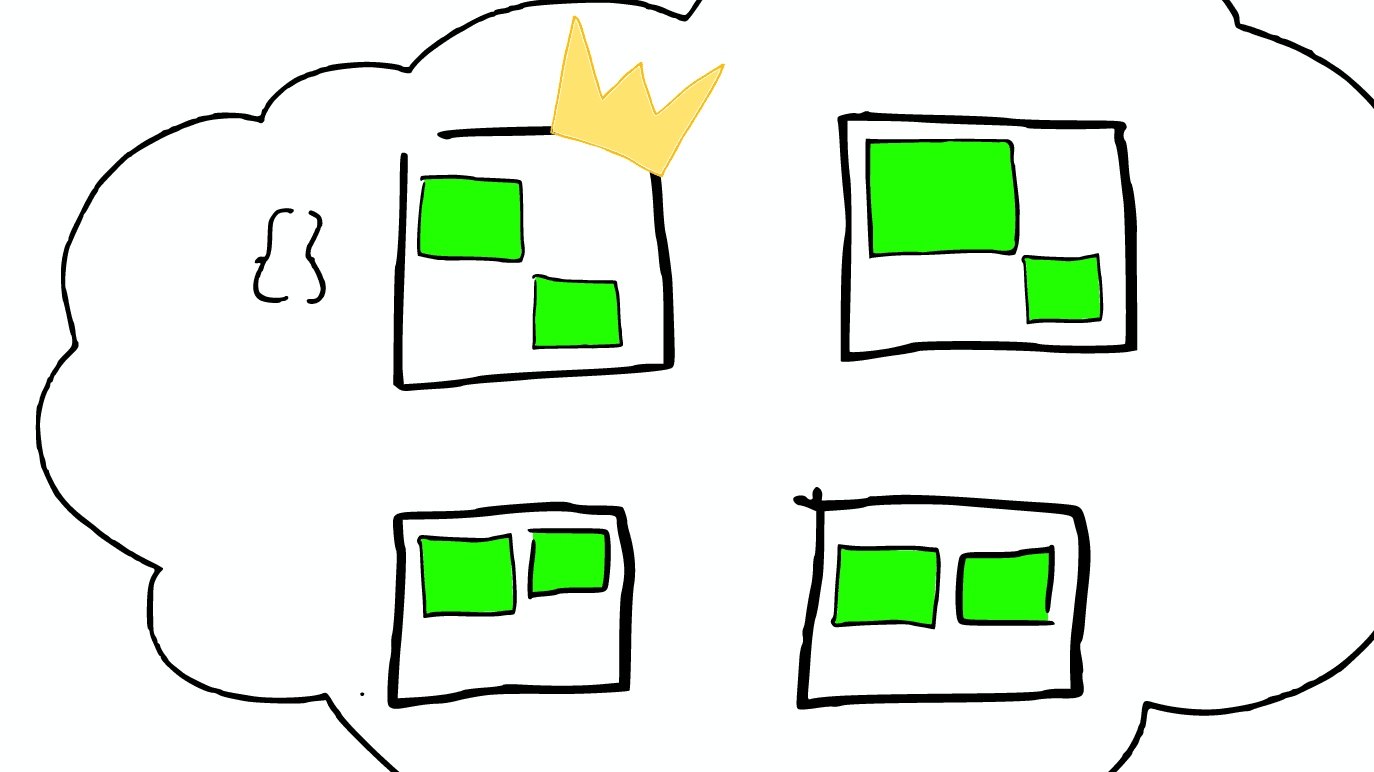
- 索引里的小方块
在一个索引下,分布在多个节点里的绿色小方块称为分片——Shard。
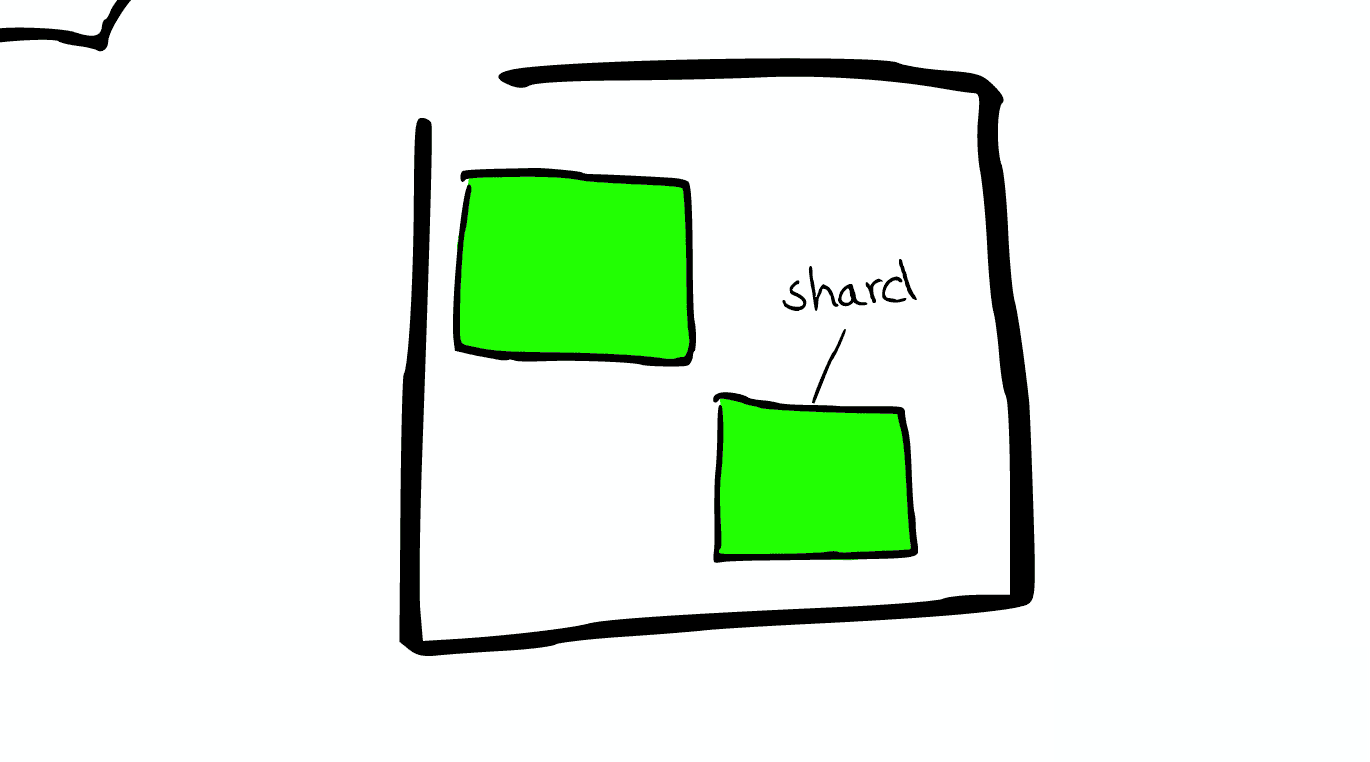
- Shard=Lucene Index
一个ElasticSearch的Shard本质上是一个Lucene Index。
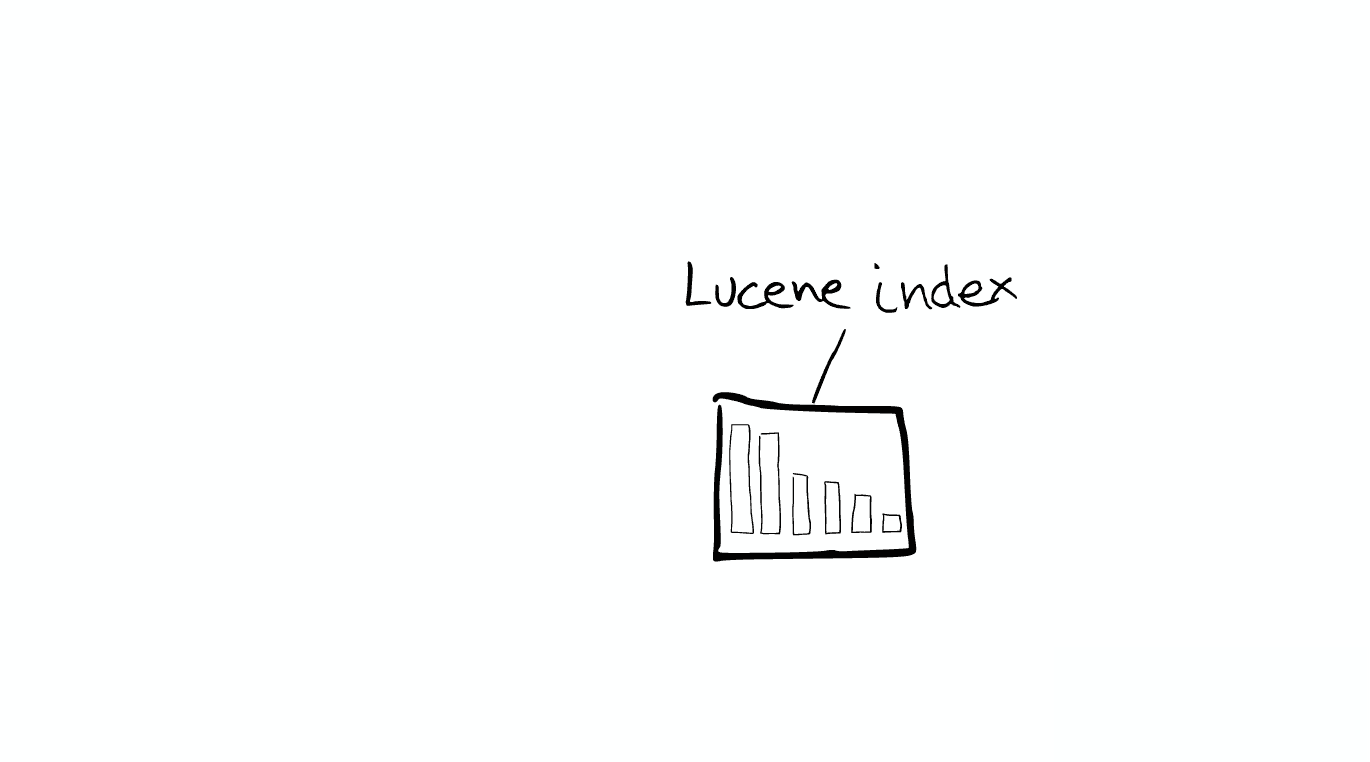
Lucene是一个Full Text 搜索库(也有很多其他形式的搜索库),ElasticSearch是建立在Lucene之上的。接下来的故事要说的大部分内容实际上是ElasticSearch如何基于Lucene工作的。
图解Lucene
Segment
- Mini索引——segment
在Lucene里面有很多小的segment,我们可以把它们看成Lucene内部的mini-index。

- Segment内部(有着许多数据结构) * Inverted Index
- Stored Fields
- Document Values
- Cache

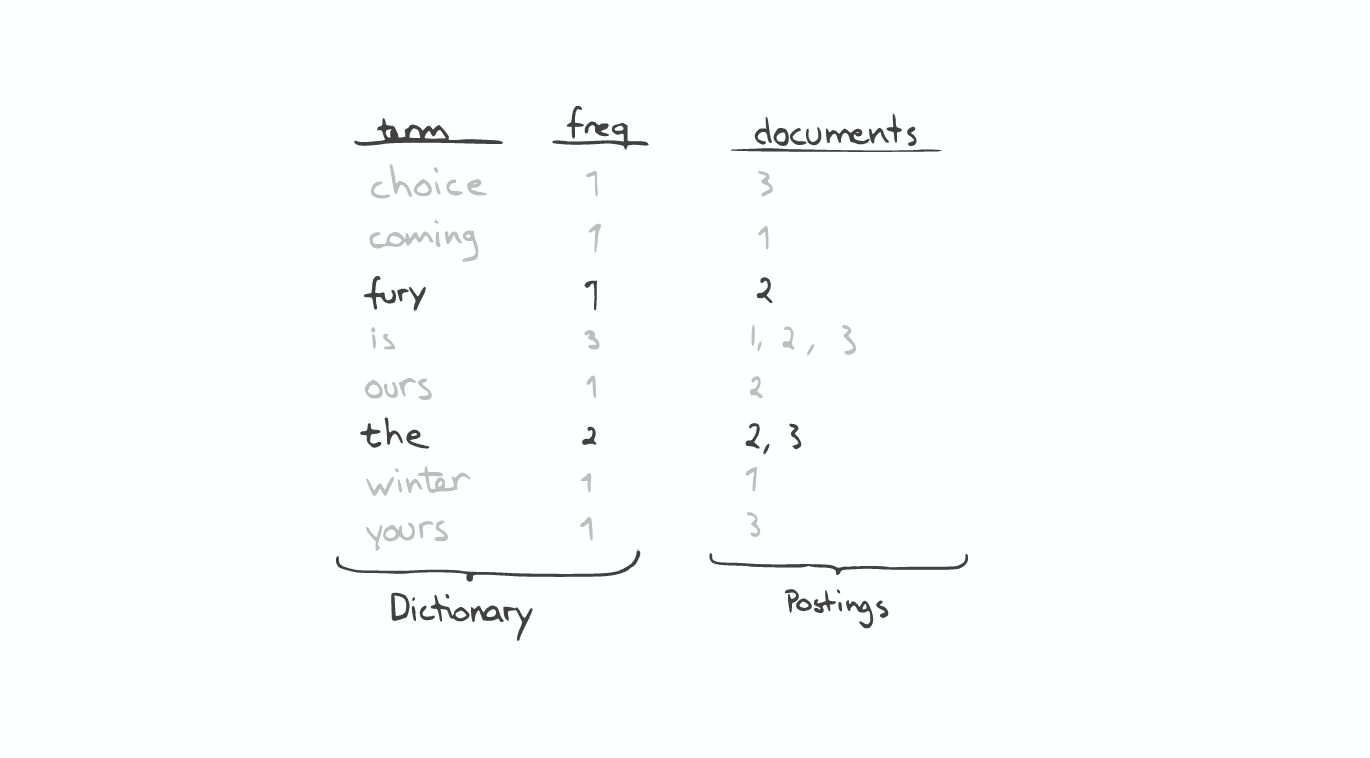
Inverted Index
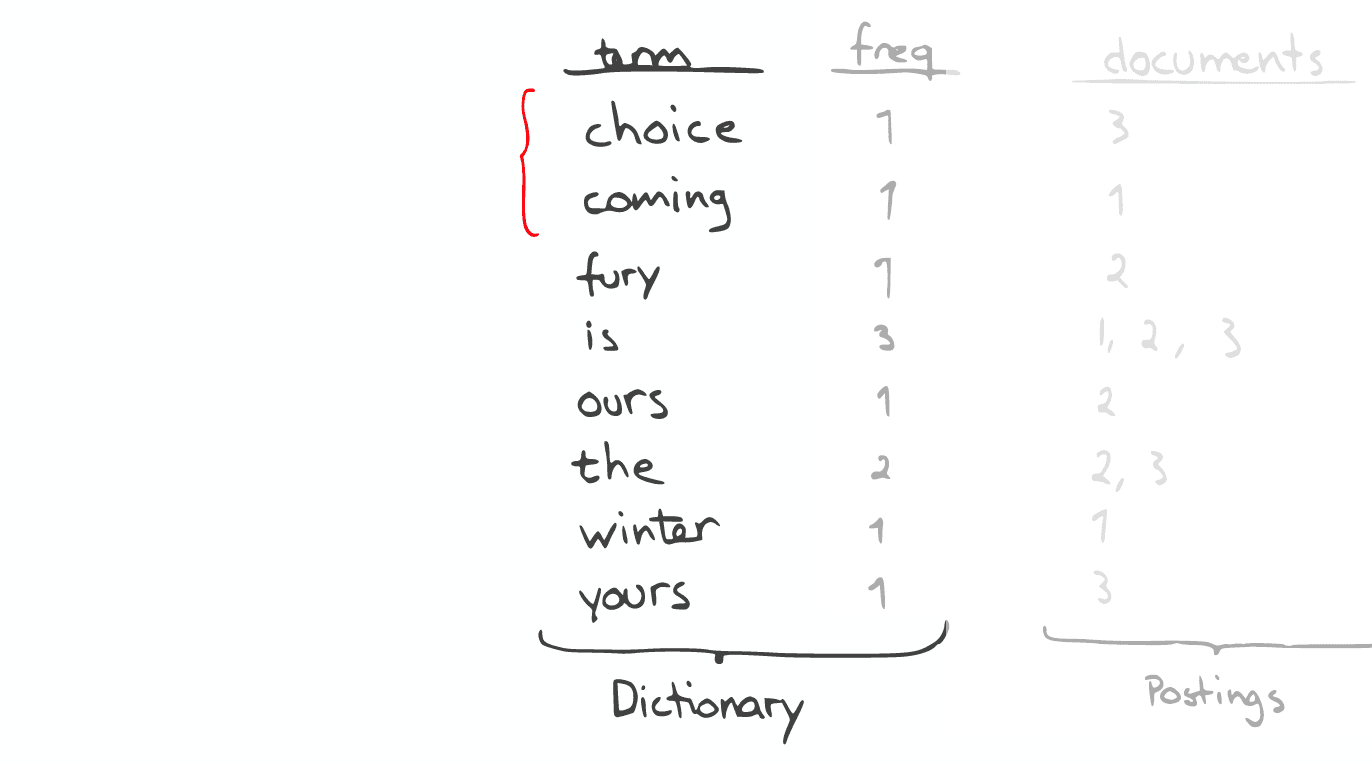
最最重要的Inverted Index

Inverted Index主要包括两部分:
- 一个有序的数据字典Dictionary(包括单词Term和它出现的频率)。
- 与单词Term对应的Postings(即存在这个单词的文件)。
当我们搜索的时候,首先将搜索的内容分解,然后在字典里找到对应Term,从而查找到与搜索相关的文件内容。

- 查询“the fury”
- 自动补全(AutoCompletion-Prefix)
如果想要查找以字母“c”开头的字母,可以简单的通过二分查找(Binary Search)在Inverted Index表中找到例如“choice”、“coming”这样的词(Term)。
- 昂贵的查找
如果想要查找所有包含“our”字母的单词,那么系统会扫描整个Inverted Index,这是非常昂贵的。
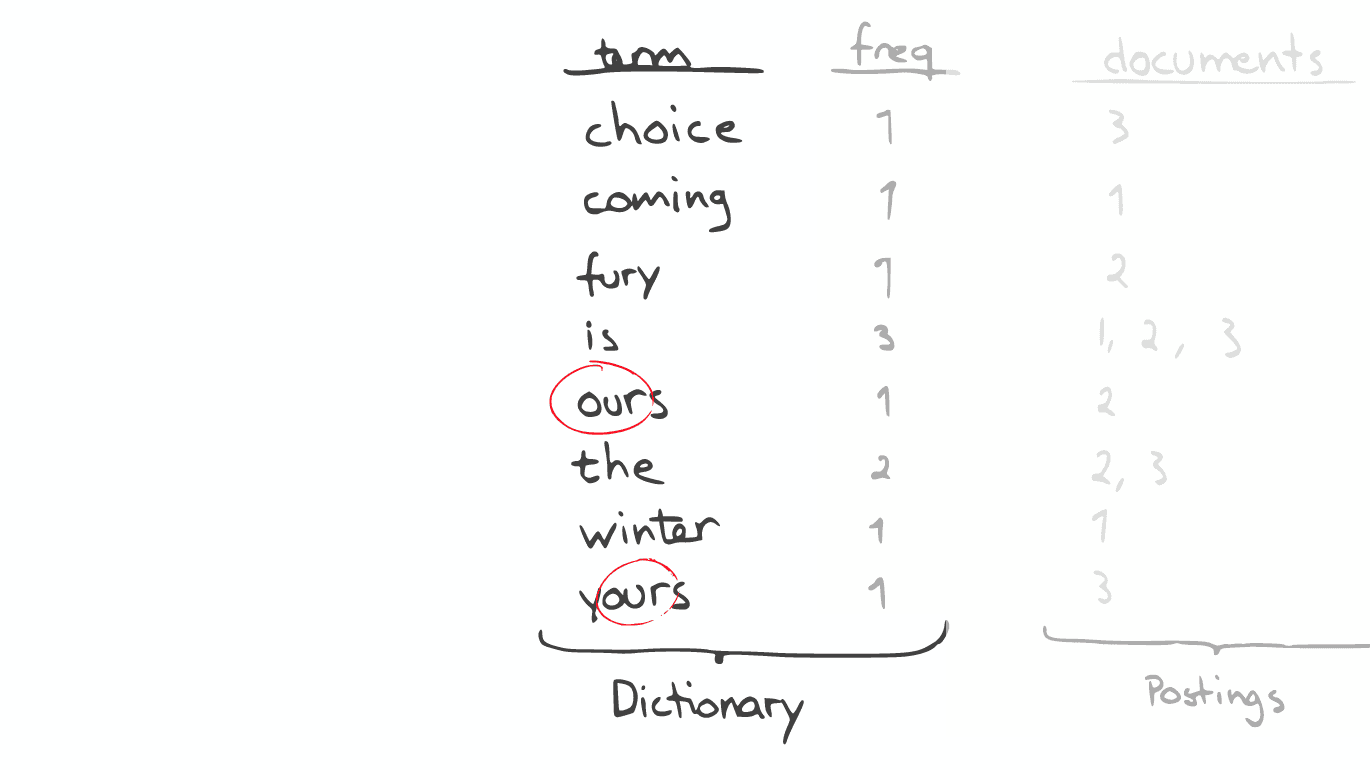
在此种情况下,如果想要做优化,那么我们面对的问题是如何生成合适的Term。
- 问题的转化

对于以上诸如此类的问题,我们可能会有几种可行的解决方案:
* suffix -> xiffus *
如果我们想以后缀作为搜索条件,可以为Term做反向处理。
(60.6384, 6.5017) -> u4u8gyykk
对于GEO位置信息,可以将它转换为GEO Hash。
123 -> {1-hundreds, 12-tens, 123}
对于简单的数字,可以为它生成多重形式的Term。
- 解决拼写错误
一个Python库 为单词生成了一个包含错误拼写信息的树形状态机,解决拼写错误的问题。

Stored Field字段查找
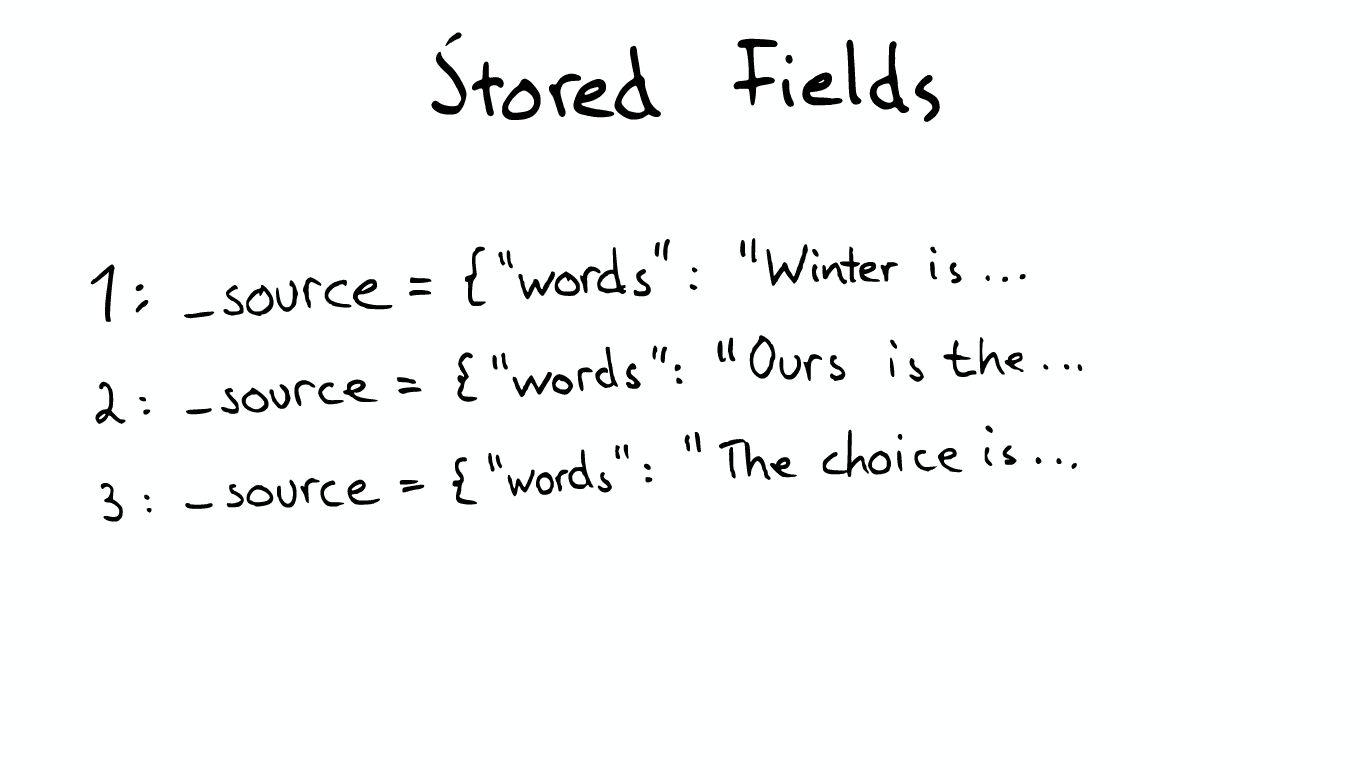
当我们想要查找包含某个特定标题内容的文件时,Inverted Index就不能很好的解决这个问题,所以Lucene提供了另外一种数据结构Stored Fields来解决这个问题。本质上,Stored Fields是一个简单的键值对key-value。默认情况下,ElasticSearch会存储整个文件的JSON source。
Document Values为了排序,聚合
即使这样,我们发现以上结构仍然无法解决诸如:排序、聚合、facet,因为我们可能会要读取大量不需要的信息。
所以,另一种数据结构解决了此种问题:Document Values。这种结构本质上就是一个列式的存储,它高度优化了具有相同类型的数据的存储结构。
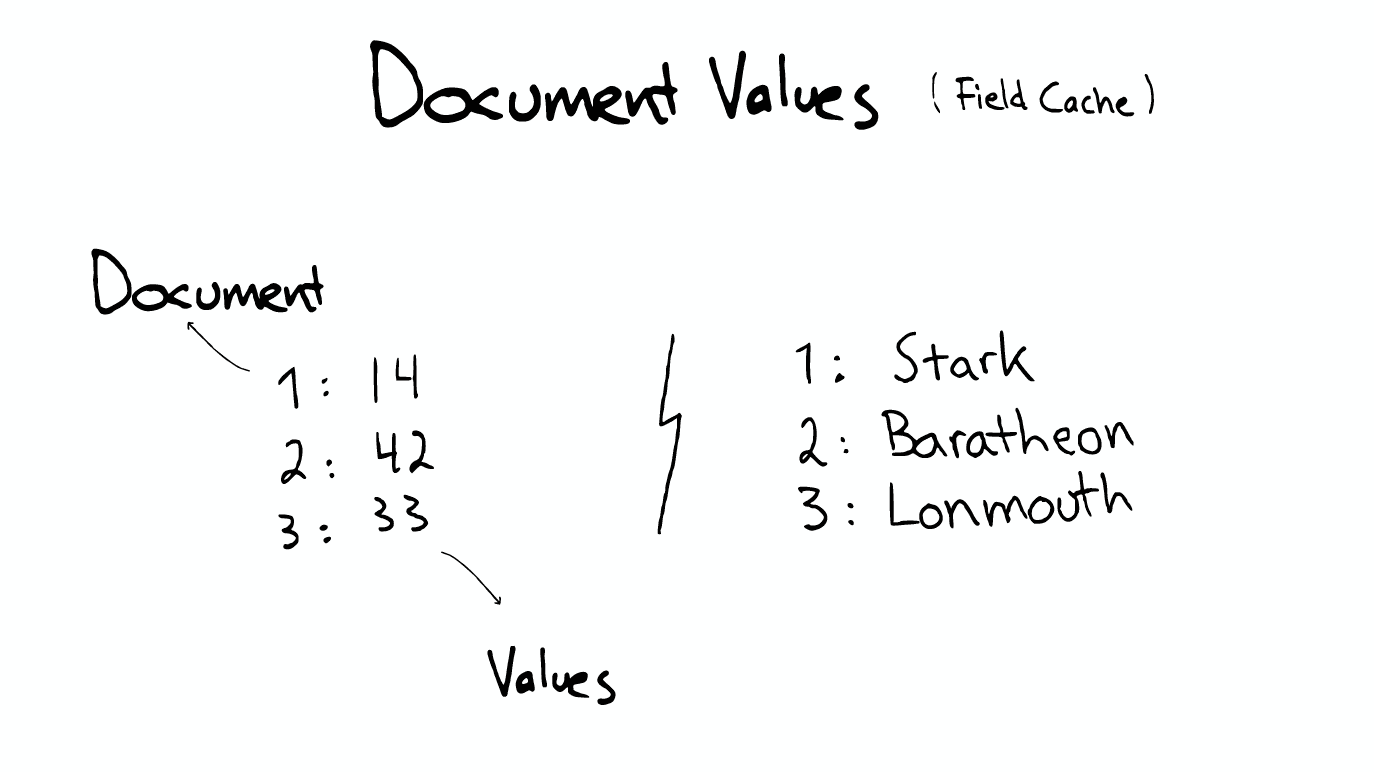
为了提高效率,ElasticSearch可以将索引下某一个Document Value全部读取到内存中进行操作,这大大提升访问速度,但是也同时会消耗掉大量的内存空间。
总之,这些数据结构Inverted Index、Stored Fields、Document Values及其缓存,都在segment内部。
搜索发生时
搜索时,Lucene会搜索所有的segment然后将每个segment的搜索结果返回,最后合并呈现给客户。
Lucene的一些特性使得这个过程非常重要:
Segments是不可变的(immutable) * Delete? 当删除发生时,Lucene做的只是将其标志位置为删除,但是文件还是会在它原来的地方,不会发生改变
Update? 所以对于更新来说,本质上它做的工作是:先删除,然后重新索引(Re-index)
随处可见的压缩 * Lucene非常擅长压缩数据,基本上所有教科书上的压缩方式,都能在Lucene中找到。
缓存所有的所有 * Lucene也会将所有的信息做缓存,这大大提高了它的查询效率。
缓存的故事
当ElasticSearch索引一个文件的时候,会为文件建立相应的缓存,并且会定期(每秒)刷新这些数据,然后这些文件就可以被搜索到。
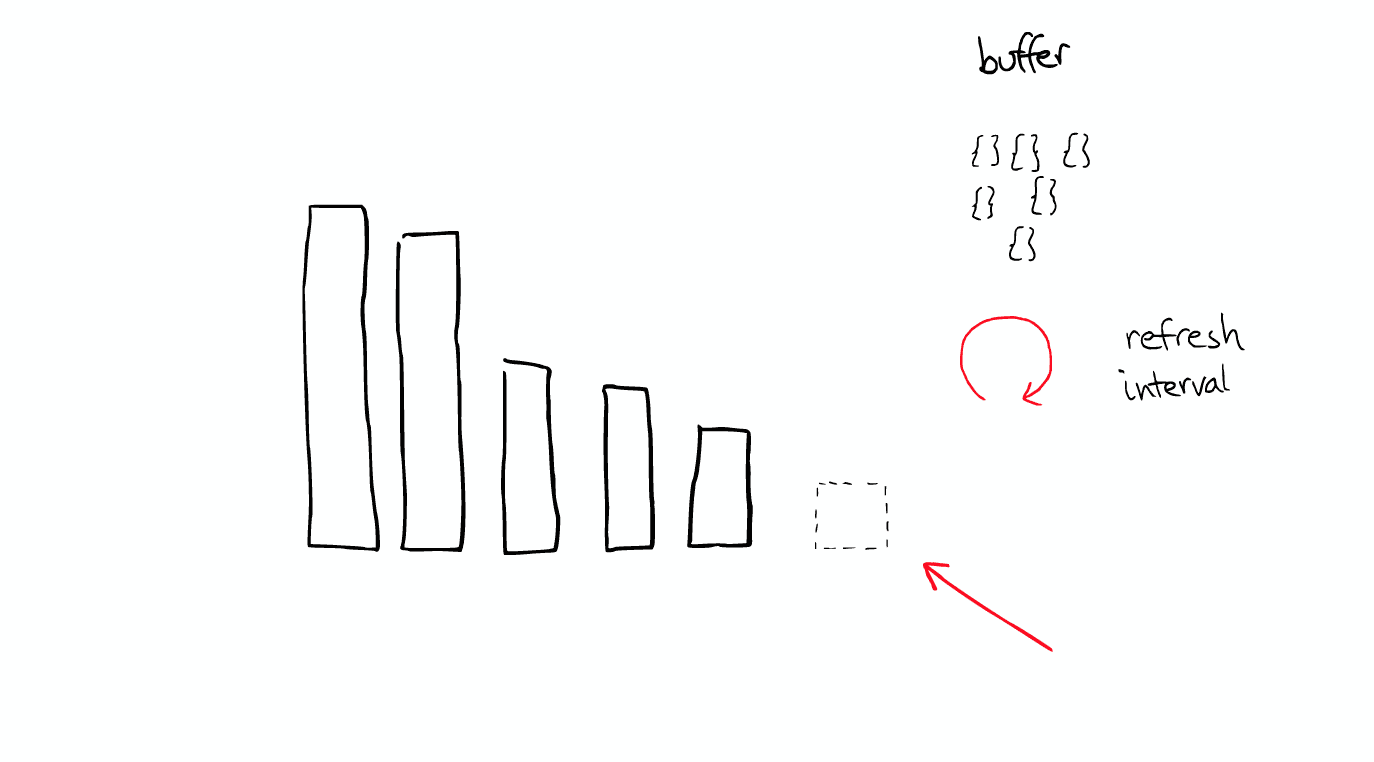
随着时间的增加,我们会有很多segments,
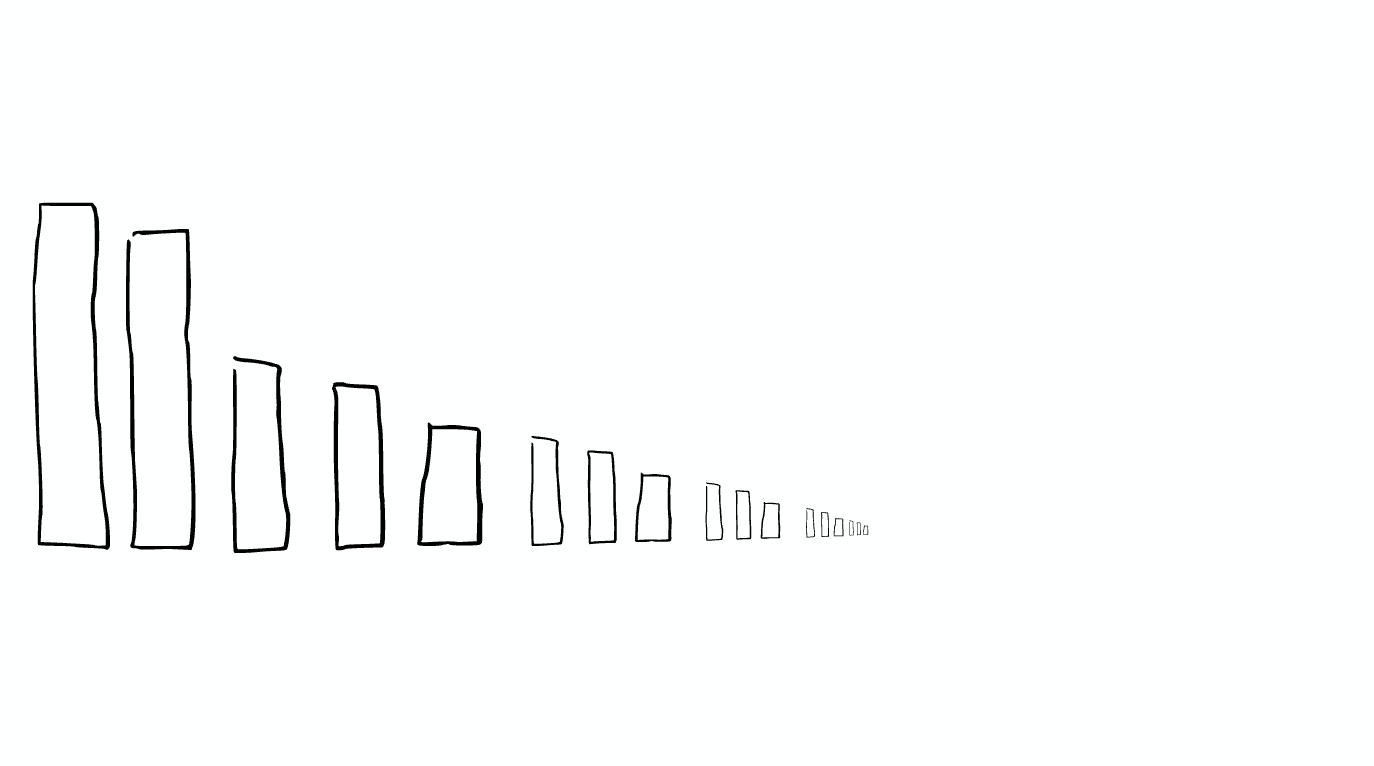
所以ElasticSearch会将这些segment合并,在这个过程中,segment会最终被删除掉
这就是为什么增加文件可能会使索引所占空间变小,它会引起merge,从而可能会有更多的压缩。
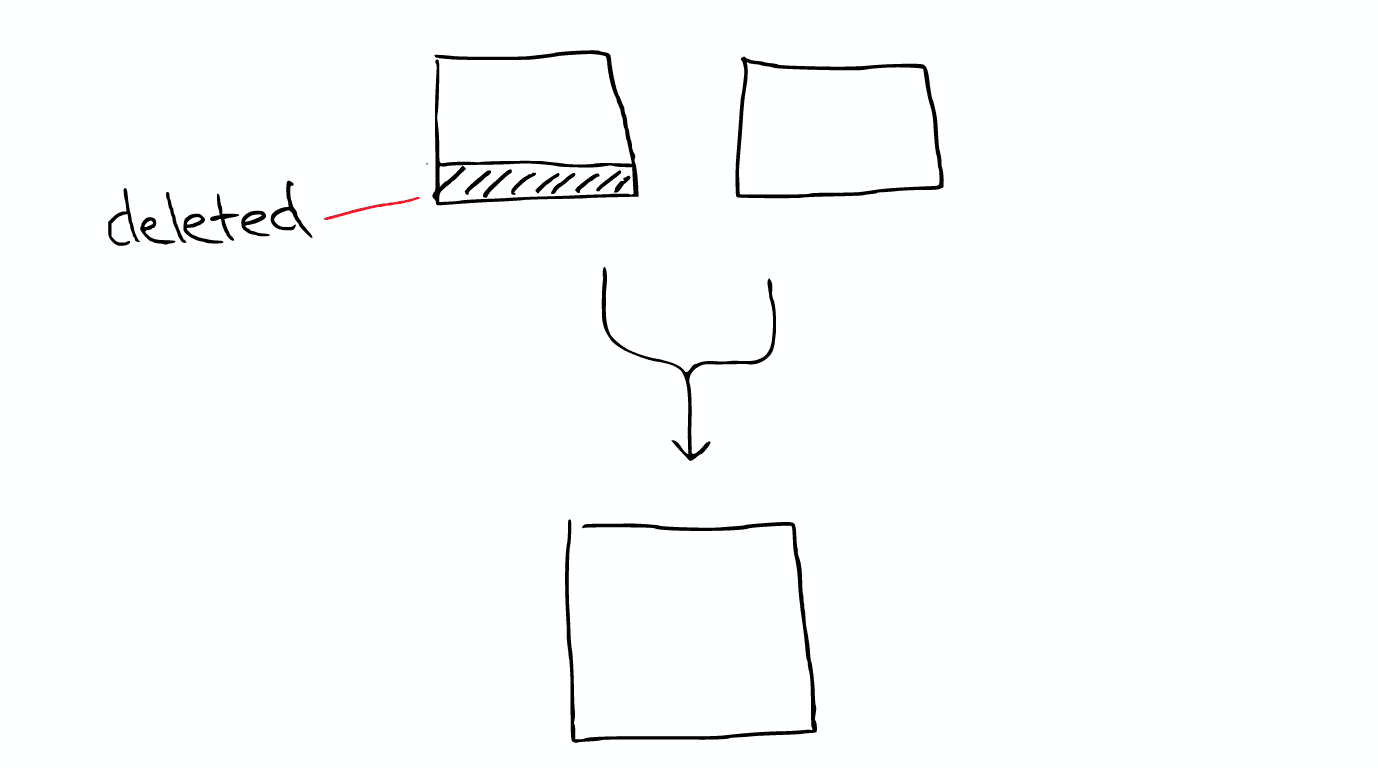
- 举个栗子
有两个segment将会merge
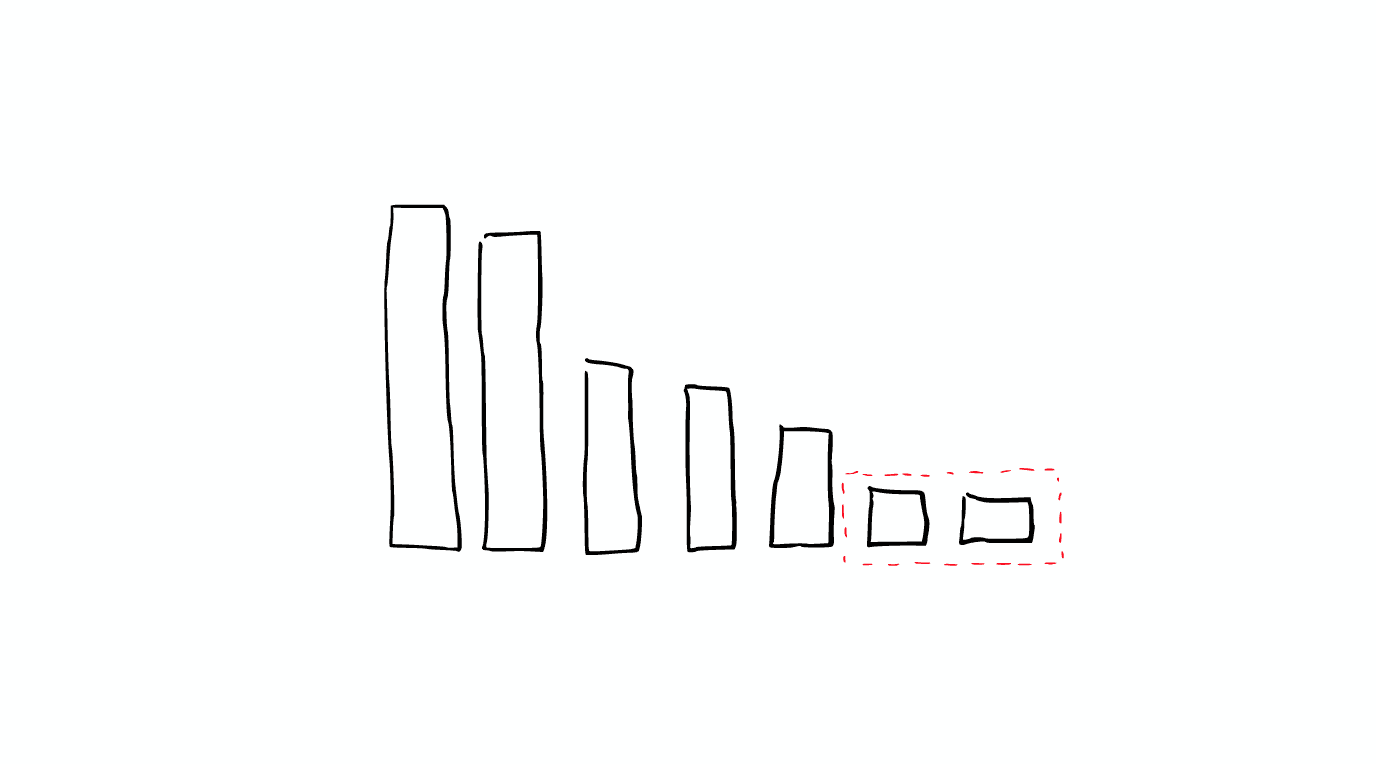
这两个segment最终会被删除,然后合并成一个新的segment
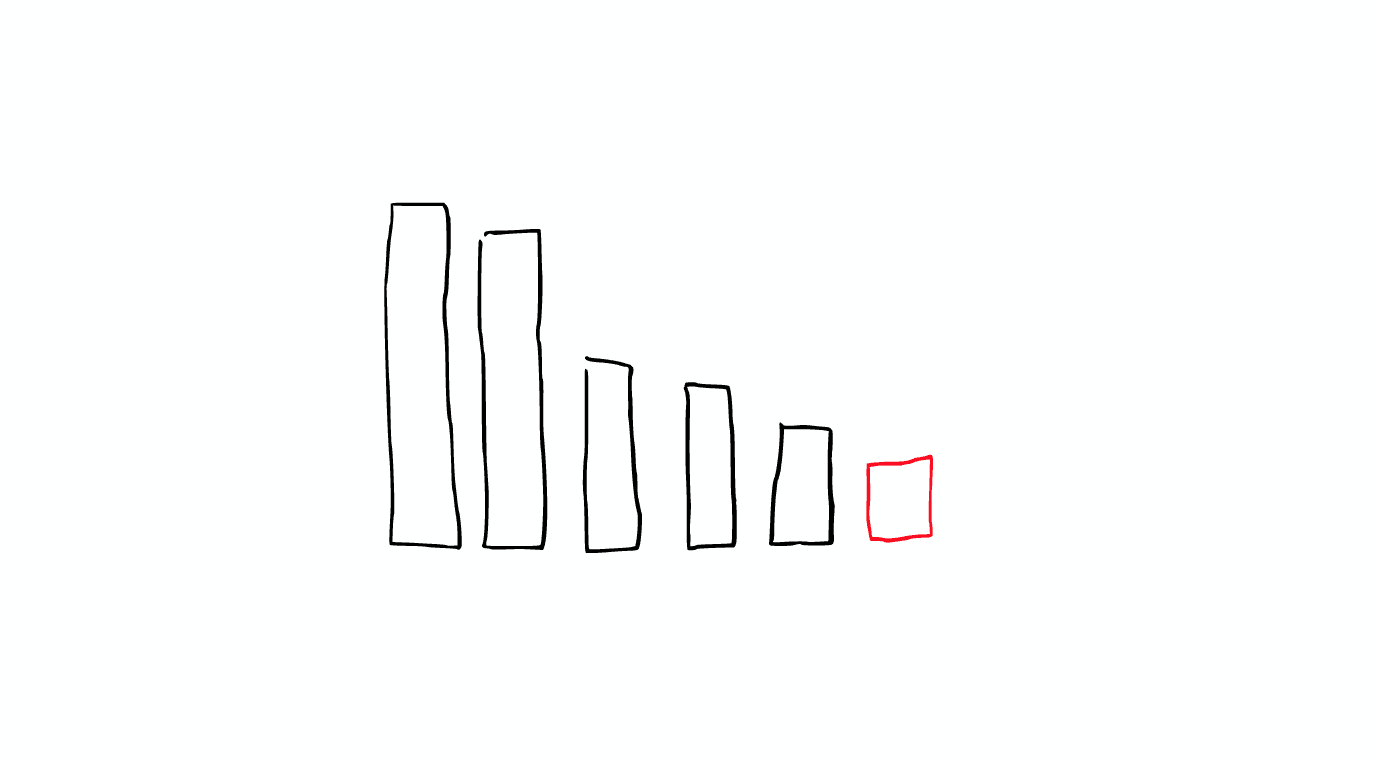
这时这个新的segment在缓存中处于cold状态,但是大多数segment仍然保持不变,处于warm状态。
以上场景经常在Lucene Index内部发生的。

在Shard中搜索
ElasticSearch从Shard中搜索的过程与Lucene Segment中搜索的过程类似。
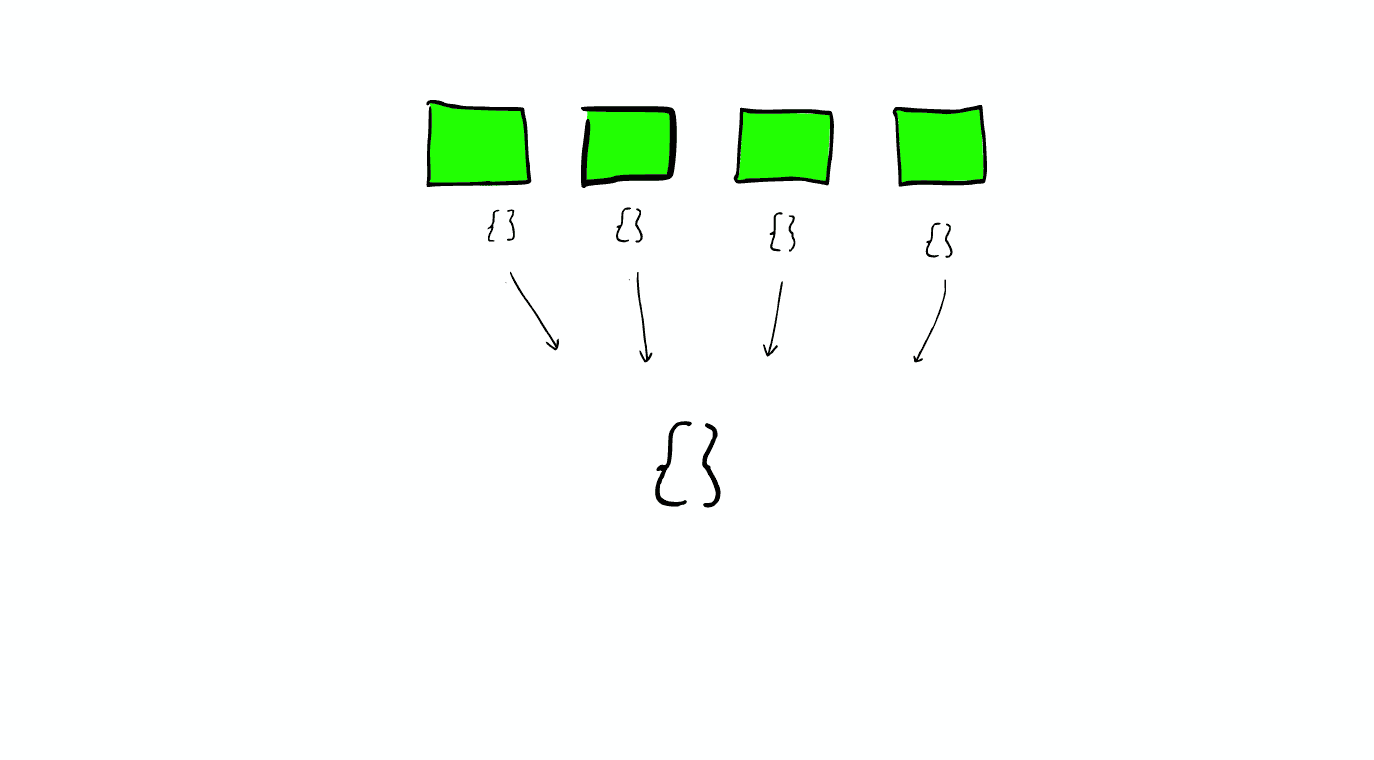
与在Lucene Segment中搜索不同的是,Shard可能是分布在不同Node上的,所以在搜索与返回结果时,所有的信息都会通过网络传输。
需要注意的是:
1次搜索查找2个shard = 2次分别搜索shard

- 对于日志文件的处理
当我们想搜索特定日期产生的日志时,通过根据时间戳对日志文件进行分块与索引,会极大提高搜索效率。
当我们想要删除旧的数据时也非常方便,只需删除老的索引即可。
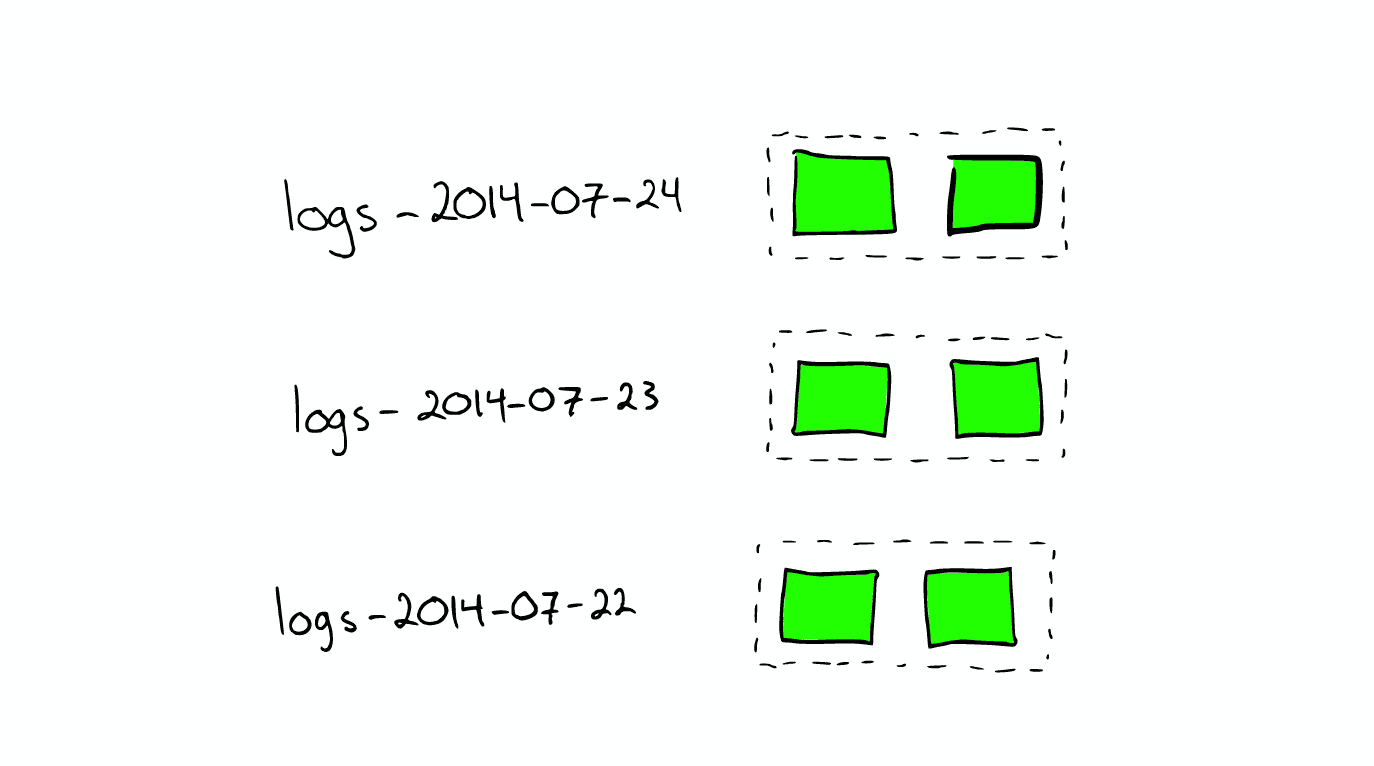
在上种情况下,每个index有两个shards
- 如何Scale

shard不会进行更进一步的拆分,但是shard可能会被转移到不同节点上
所以,如果当集群节点压力增长到一定的程度,我们可能会考虑增加新的节点,这就会要求我们对所有数据进行重新索引,这是我们不太希望看到的,所以我们需要在规划的时候就考虑清楚,如何去平衡足够多的节点与不足节点之间的关系。
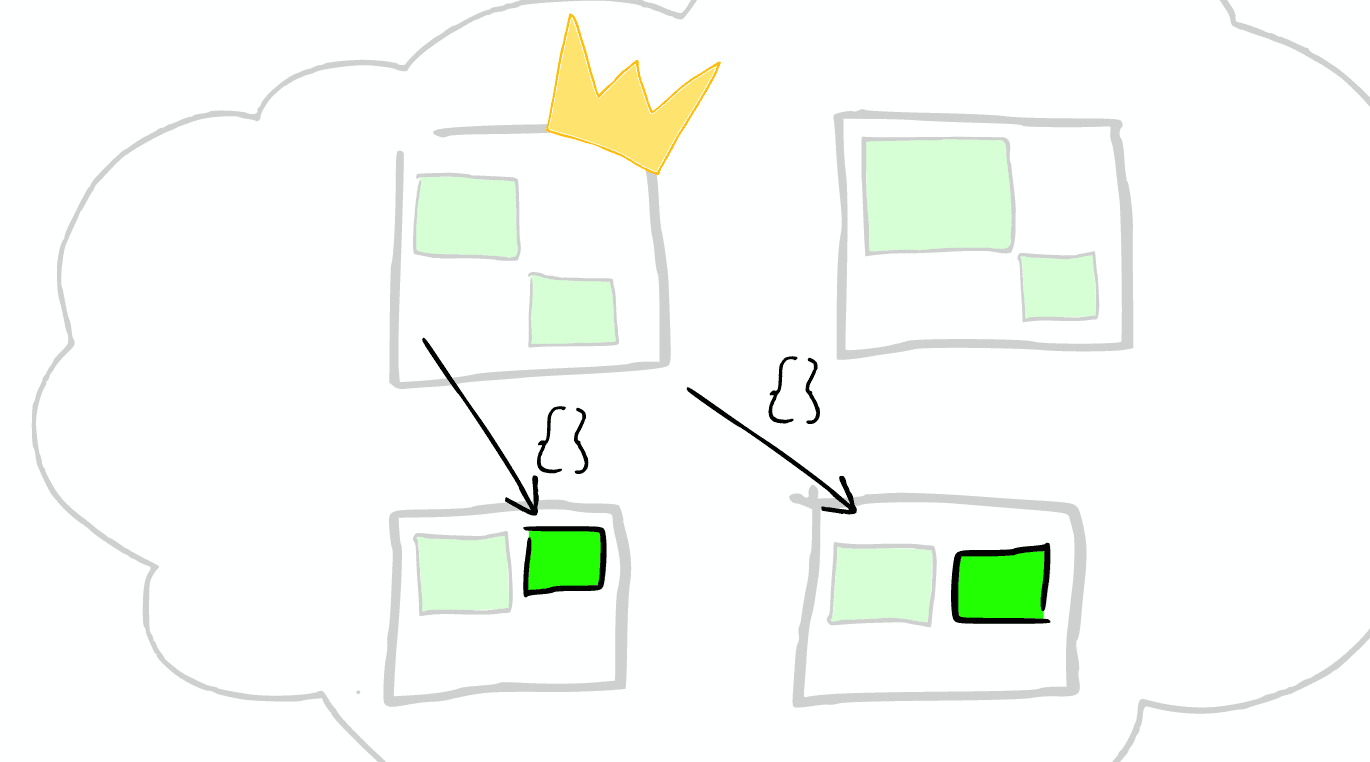
- 节点分配与Shard优化* 为更重要的数据索引节点,分配性能更好的机器
- 确保每个shard都有副本信息replica

- 路由Routing
每个节点,每个都存留一份路由表,所以当请求到任何一个节点时,ElasticSearch都有能力将请求转发到期望节点的shard进一步处理。

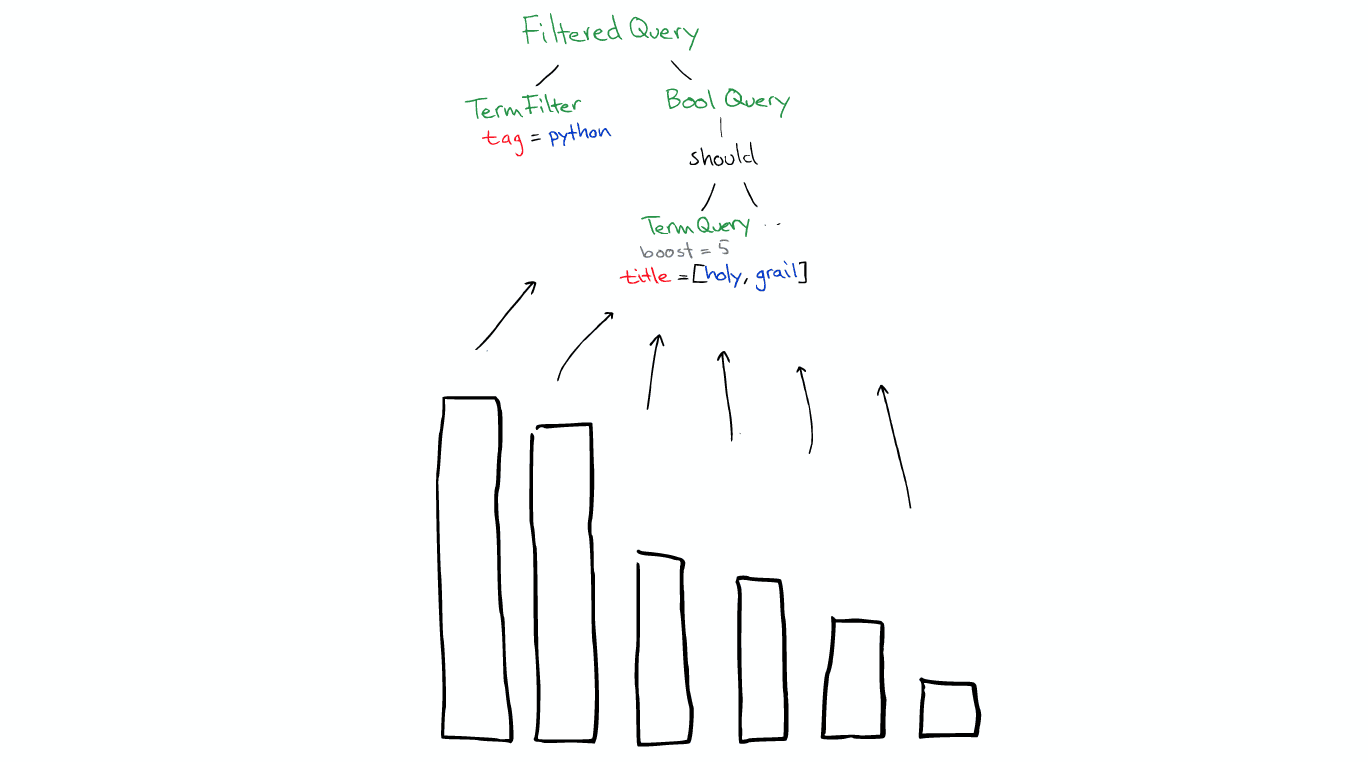
一个真实的请求

- Query
Query有一个类型filtered,以及一个multi_match的查询
- Aggregation
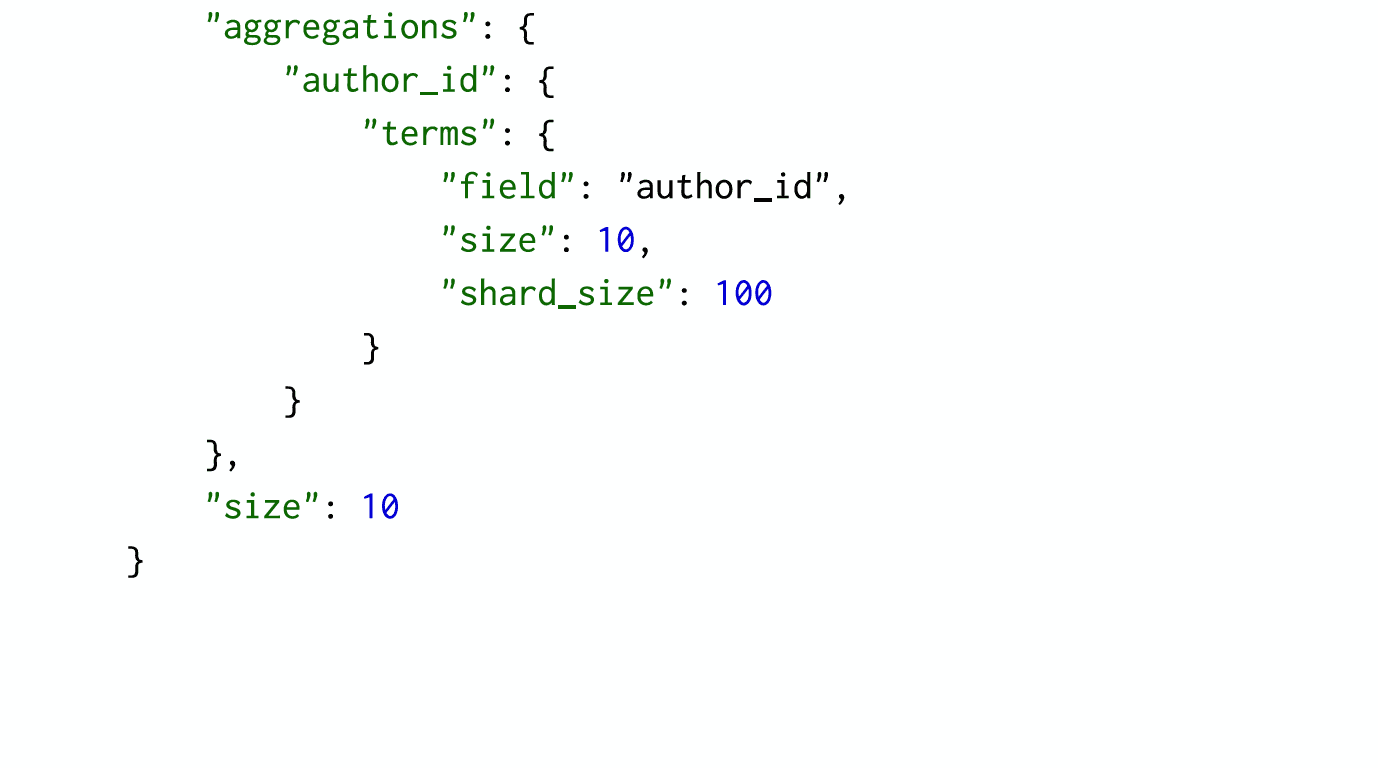
根据作者进行聚合,得到top10的hits的top10作者的信息
- 请求分发
这个请求可能被分发到集群里的任意一个节点
- 上帝节点
这时这个节点就成为当前请求的协调者(Coordinator),它决定: a) 根据索引信息,判断请求会被路由到哪个核心节点 b) 以及哪个副本是可用的 c) 等等
- 路由
- 在真实搜索之前
ElasticSearch 会将Query转换成Lucene Query

然后在所有的segment中执行计算

对于Filter条件本身也会有缓存

但queries不会被缓存,所以如果相同的Query重复执行,应用程序自己需要做缓存
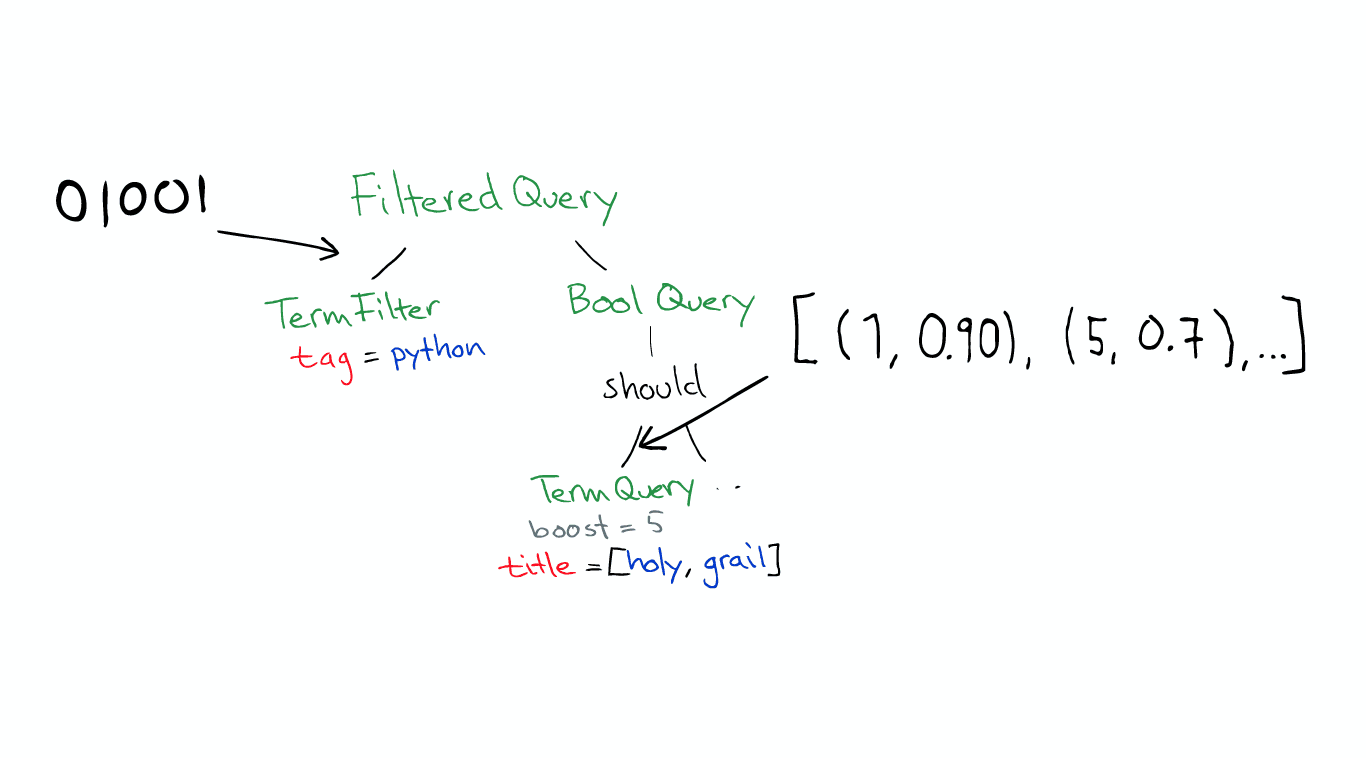
所以,
a) filters可以在任何时候使用 b) query只有在需要score的时候才使用
- 返回
搜索结束之后,结果会沿着下行的路径向上逐层返回。



参考来源
SlideShare: Elasticsearch From the Bottom Up
Youtube: Elasticsearch from the bottom up
Wiki: Document-term matrix
Wiki: Search engine indexing
Skip list
Standford Edu: Faster postings list intersection via skip pointers
StackOverflow: how an search index works when querying many words?
StackOverflow: how does lucene calculate intersection of documents so fast?
Lucene and its magical indexes
misspellings 2.0c: A tool to detect misspellings